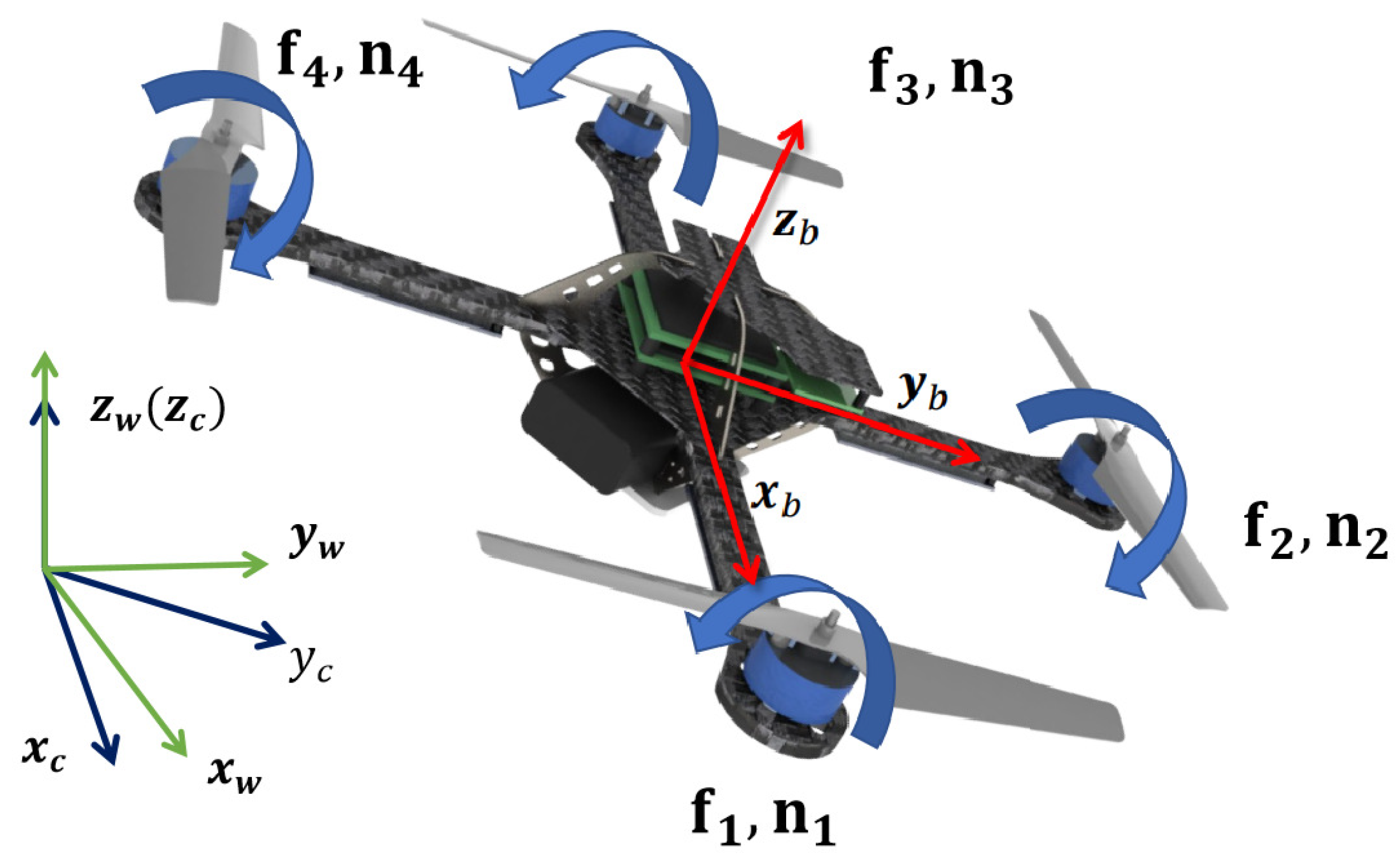
Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
Par un écrivain mystérieux
Description
We tackle the problem of flying time-optimal trajectories through multiple waypoints with quadrotors. State-of-the-art solutions split the problem into a pla

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight

PDF) A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight

Time-optimal planning for quadrotor waypoint flight

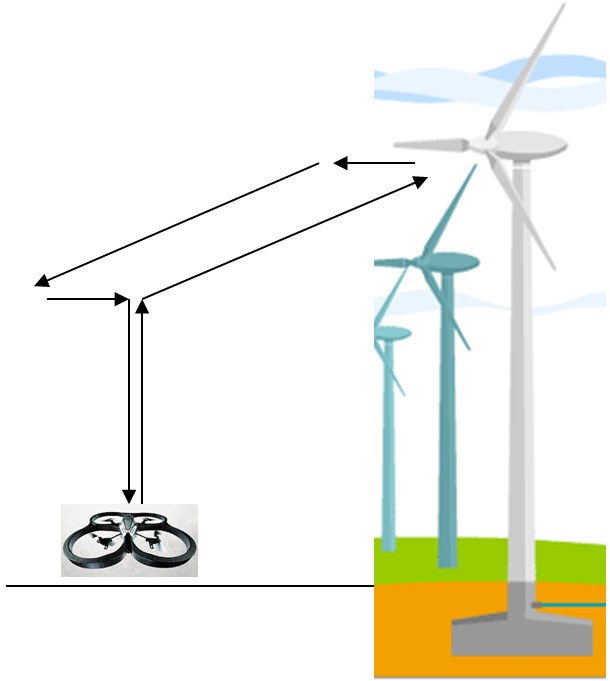
Automated vision-based structural health inspection and assessment for post-construction civil infrastructure - ScienceDirect

NeuroBEM: Hybrid Aerodynamic Quadrotor Model (RSS 2021)

Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)
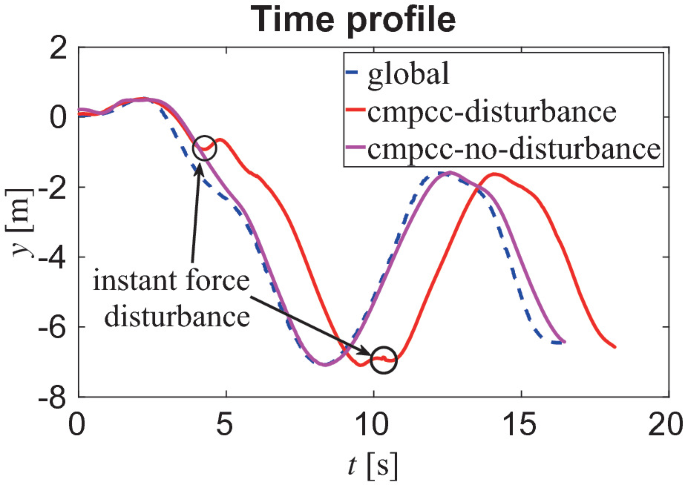
CMPCC: Corridor-Based Model Predictive Contouring Control for Aggressive Drone Flight

Model Predictive Contouring Control for Time-Optimal Quadrotor Flight (TRO 2022)

PDF] A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight

PDF] Model Predictive Contouring Control for Time-Optimal Quadrotor Flight

PDF) Time-optimal planning for quadrotor waypoint flight
Drones, Free Full-Text
depuis
par adulte (le prix varie selon la taille du groupe)