Actuators, Free Full-Text
Par un écrivain mystérieux
Description
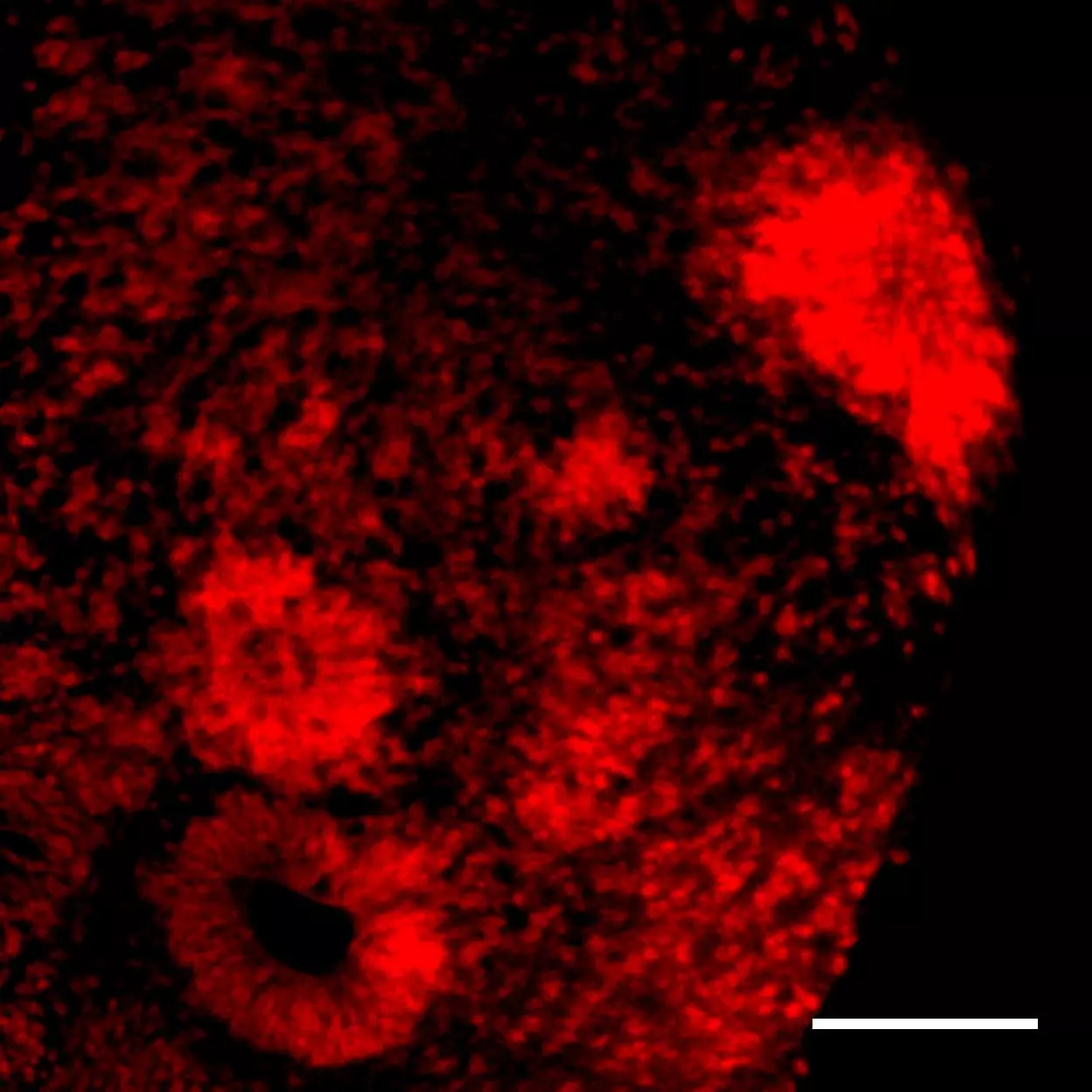
Industries such as the manufacturing or logistics industry need algorithms that are flexible to handle novel or unknown objects. Many current solutions in the market are unsuitable for grasping these objects in high-mix and low-volume scenarios. Finally, there are still gaps in terms of grasping accuracy and speed that we would like to address in this research. This project aims to improve the robotic grasping capability for novel objects with varying shapes and textures through the use of soft grippers and data-driven learning in a hyper-personalization line. A literature review was conducted to understand the tradeoffs between the deep reinforcement learning (DRL) approach and the deep learning (DL) approach. The DRL approach was found to be data-intensive, complex, and collision-prone. As a result, we opted for a data-driven approach, which to be more specific, is PointNet GPD in this project. In addition, a comprehensive market survey was performed on tactile sensors and soft grippers with consideration of factors such as price, sensitivity, simplicity, and modularity. Based on our study, we chose the Rochu two-fingered soft gripper with our customized force-sensing resistor (FSR) force sensors mounted on the fingertips due to its modularity and compatibility with tactile sensors. A software architecture was proposed, including a perception module, picking module, transfer module, and packing module. Finally, we conducted model training using a soft gripper configuration and evaluated grasping with various objects, such as fast-moving consumer goods (FMCG) products, fruits, and vegetables, which are unknown to the robot prior to grasping. The grasping accuracy was improved from 75% based on push and grasp to 80% based on PointNetGPD. This versatile grasping platform is independent of gripper configurations and robot models. Future works are proposed to further enhance tactile sensing and grasping stability.

TORK Pneumatic Actuators - SMS-TORK - PDF Catalogs, Technical Documentation

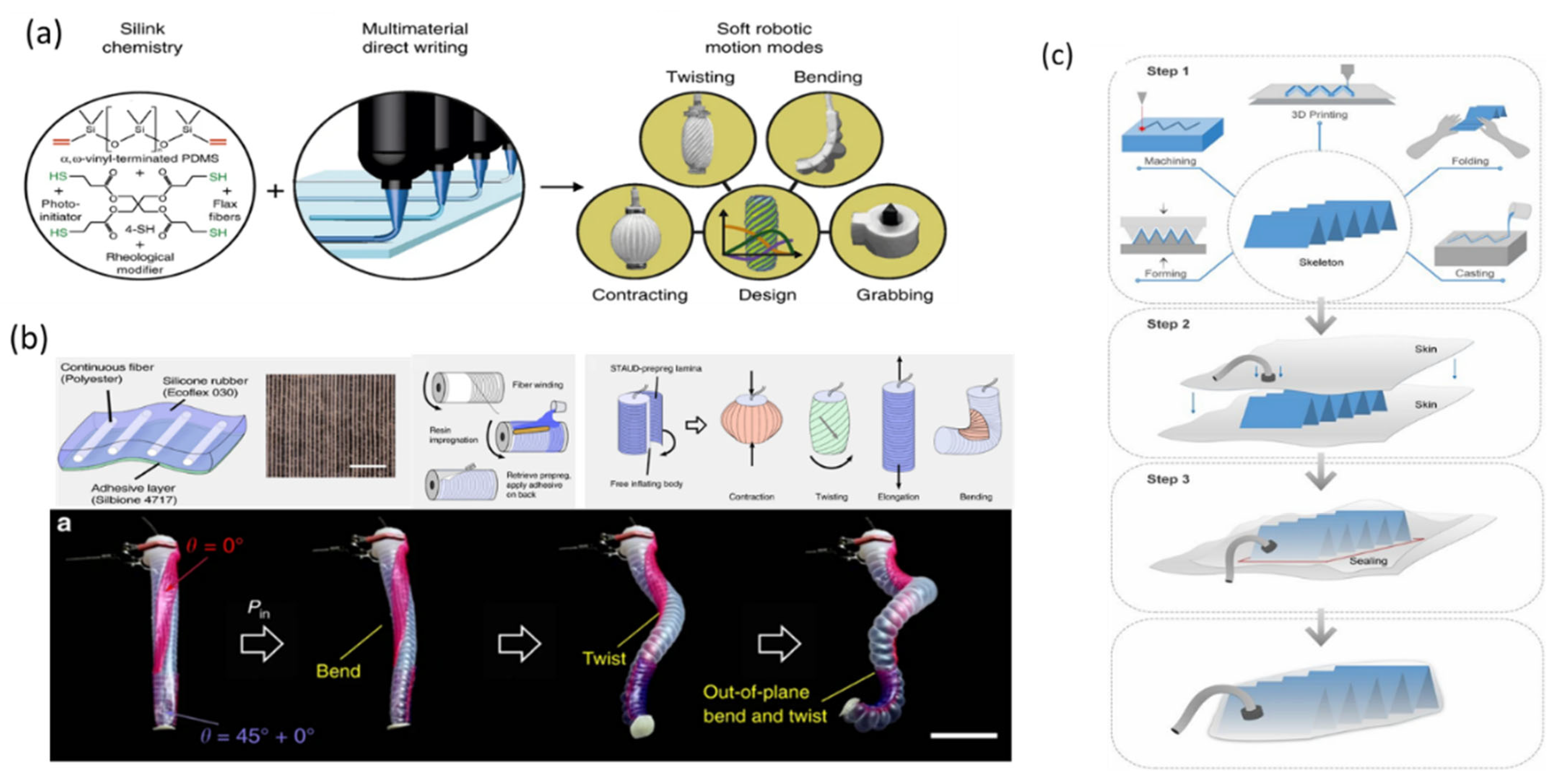
Amplifying the response of soft actuators by harnessing snap-through instabilities
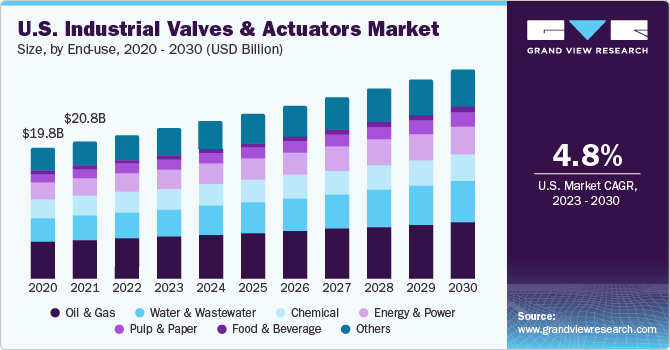
Industrial Valves And Actuators Market Size Report, 2030
PDF) Model-Free Adaptive Control of Direct Drive Servo Valve of Electromagnetic Linear Actuator
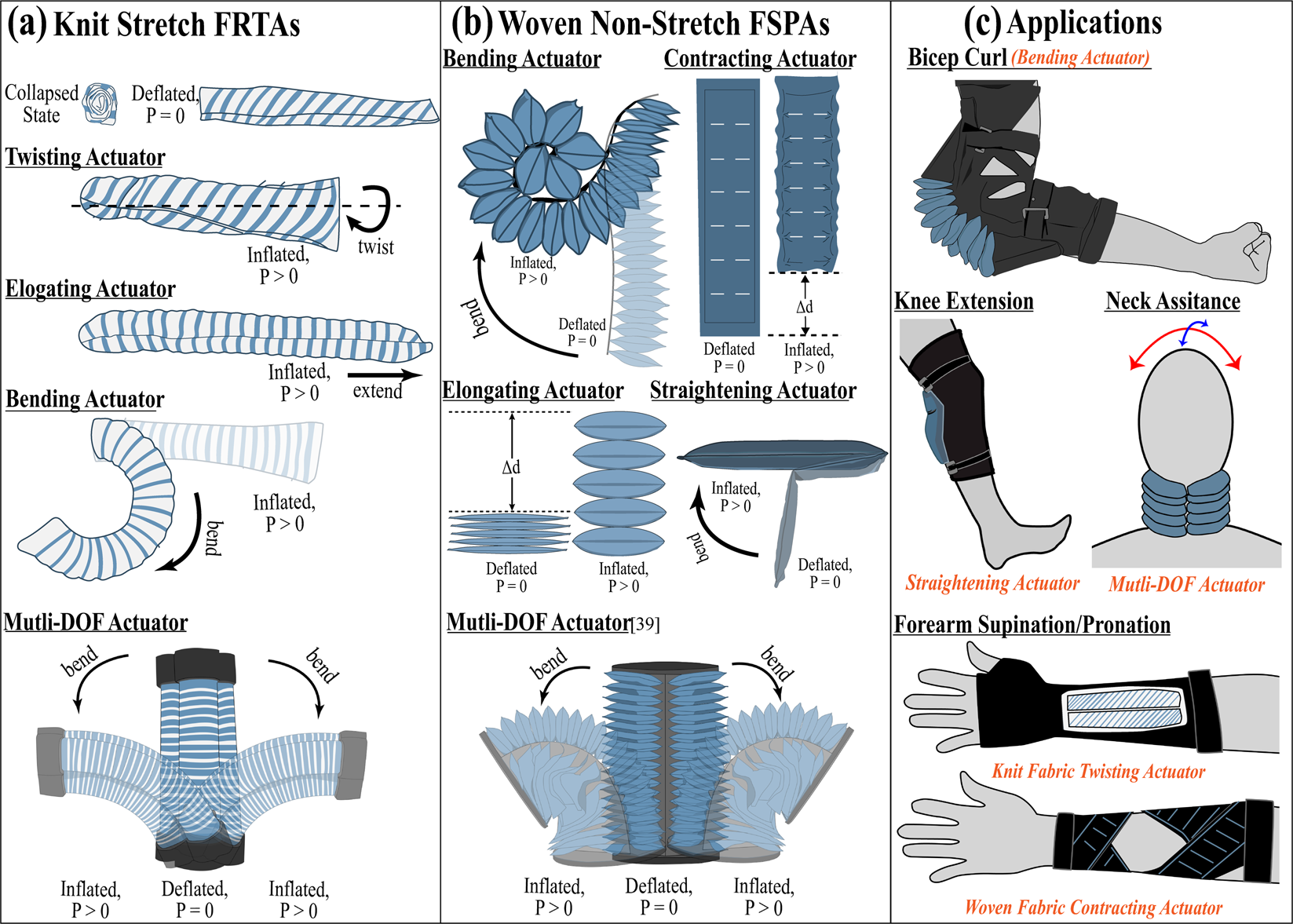
Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices
Textiles, Free Full-Text
What is an actuator and What are the Different Types of Actuators
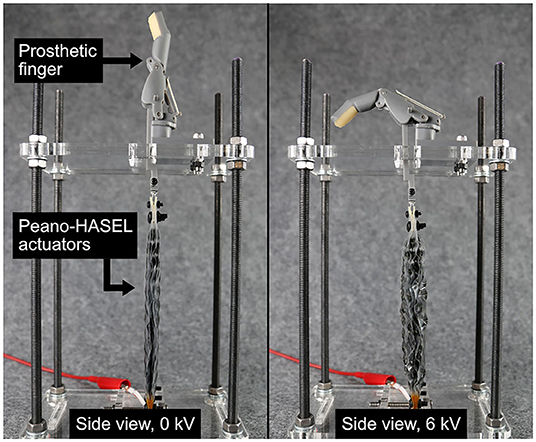
Frontiers Design of a High-Speed Prosthetic Finger Driven by Peano-HASEL Actuators

Bench Testing Linear Actuator Before Implementation – Progressive Automations

Full Closed Dust-Free Linear Actuators with Single Axis or Dual Axises for Solar Equipments Manufacturer - China Full Closed Linear Actuators, Single Axis Linear Actuators
Actuators, Free Full-Text
depuis
par adulte (le prix varie selon la taille du groupe)